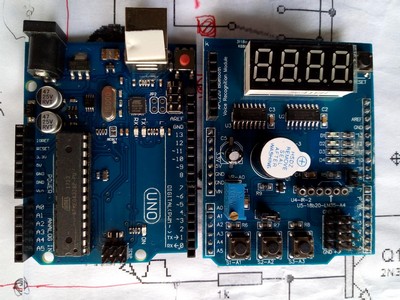
















 La tarjeta entrenadora Arduino (ArduKit) es una placa de bajo costo que se conecta directamente con los controladores Arduino UNO o Arduino Mega2560. Gracias a sus sencillos periféricos y variedad de conectores se convierte en el complemento ideal para realizar los primeros programas y proyectos basados en la plataforma ARDUINO, apta para todos los públicos.
Opcionalmente a esta tarjeta se le puede conectar un motor DC de bajo consumo (menos de 40mA), el cual se conecta a las salidas (PWM) D3 y D5. Con ellas se puede controlar velocidad y sentido de giro. Mas Info...
La tarjeta entrenadora Arduino (ArduKit) es una placa de bajo costo que se conecta directamente con los controladores Arduino UNO o Arduino Mega2560. Gracias a sus sencillos periféricos y variedad de conectores se convierte en el complemento ideal para realizar los primeros programas y proyectos basados en la plataforma ARDUINO, apta para todos los públicos.
Opcionalmente a esta tarjeta se le puede conectar un motor DC de bajo consumo (menos de 40mA), el cual se conecta a las salidas (PWM) D3 y D5. Con ellas se puede controlar velocidad y sentido de giro. Mas Info... Curso de programación Arduino,
características, usos y aplicaciones.
Ya que el objetivo principal de Arduino es interactuar con el mundo físico, se incluyen en este curso los conocimientos y recursos necesarios para actuar en el mundo real y recoger información de éste. Además, se impartirán nociones básicas de electrónica necesarias para...
Curso de programación Arduino,
características, usos y aplicaciones.
Ya que el objetivo principal de Arduino es interactuar con el mundo físico, se incluyen en este curso los conocimientos y recursos necesarios para actuar en el mundo real y recoger información de éste. Además, se impartirán nociones básicas de electrónica necesarias para...
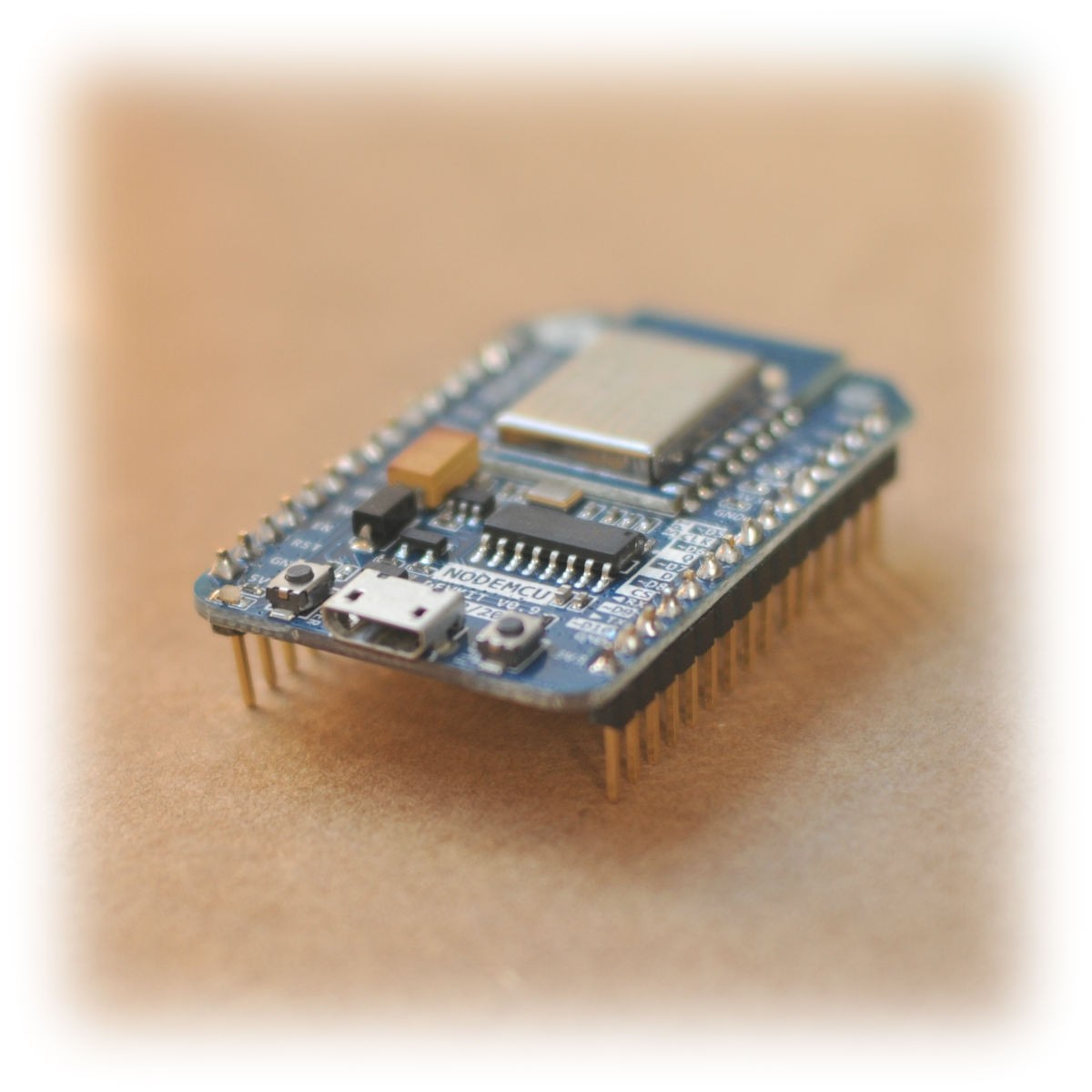
 PocketBot2 es un pequeño robot seguidor de linea. Está basado en su antecesor, el PocketBot Project. PocketBot2 tiene nuevas características importantes, aunque todavía mantiene todas las funciones y propiedades de la versión anterior del robot. Es decir, las reducidas dimensiones de 48 × 32 × 12 mm se conservan, por lo que el robot se adapta perfectamente en una caja de fósforos. Esta basado en un microcontrolador Atmel ATXmega128A3 y el programa está escrito en C. Una placa de circuito impreso doble faz hace las veces de chasis del robot. Tiene dos ruedas y dos puntos que sostienen la parte delantera y trasera. Se alimenta con una batería recargable de Li-Pol (3.7V, 190mAh). Posee un conector de 10 pines para conectar con la interfaz JTAG y UART para programar y depurar.
PocketBot2 es un pequeño robot seguidor de linea. Está basado en su antecesor, el PocketBot Project. PocketBot2 tiene nuevas características importantes, aunque todavía mantiene todas las funciones y propiedades de la versión anterior del robot. Es decir, las reducidas dimensiones de 48 × 32 × 12 mm se conservan, por lo que el robot se adapta perfectamente en una caja de fósforos. Esta basado en un microcontrolador Atmel ATXmega128A3 y el programa está escrito en C. Una placa de circuito impreso doble faz hace las veces de chasis del robot. Tiene dos ruedas y dos puntos que sostienen la parte delantera y trasera. Se alimenta con una batería recargable de Li-Pol (3.7V, 190mAh). Posee un conector de 10 pines para conectar con la interfaz JTAG y UART para programar y depurar.
Author
Ondřej Staněk (22) es el estudiante de tercer año de la carrera ciencias de la Computación en la Facultad de Matemáticas y Física en la Universidad Charles de Praga, la República Checa. Le interesa la robótica, la programación de computadoras, la electrónica y el diseño de sistemas. Participa en el equipo Umornik Robótica de la Universidad Carolina. Por otra parte, desarrolla sistemas embebidos personalizados, principalmente con fines científicos.
Página del proyecto: http://ostan.cz/PocketBot2/
Deja un comentario