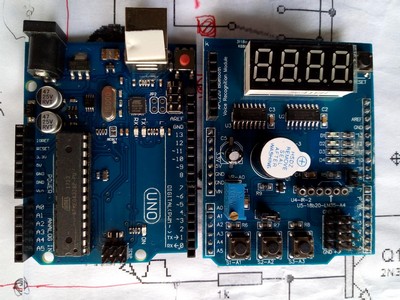














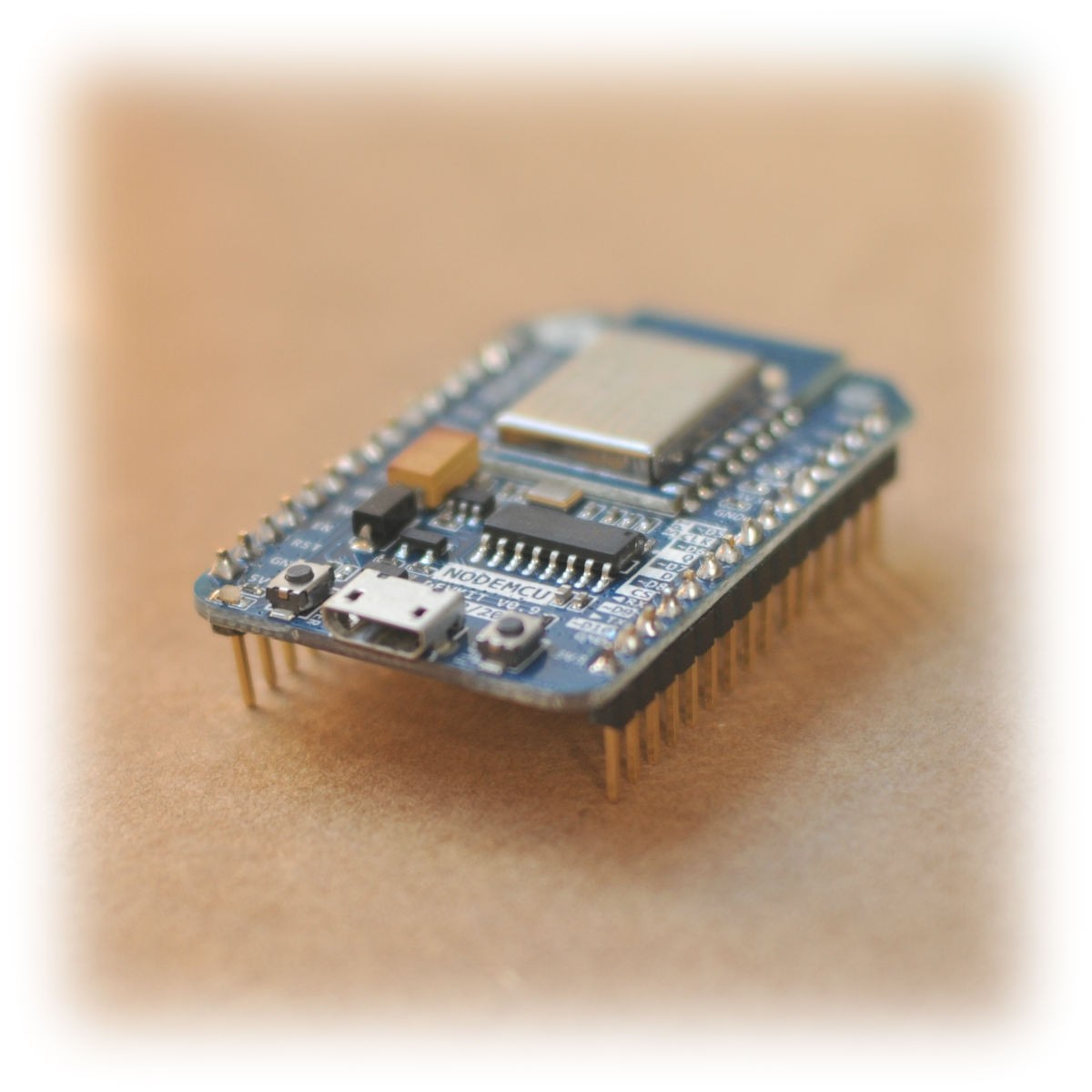


 La tarjeta entrenadora Arduino (ArduKit) es una placa de bajo costo que se conecta directamente con los controladores Arduino UNO o Arduino Mega2560. Gracias a sus sencillos periféricos y variedad de conectores se convierte en el complemento ideal para realizar los primeros programas y proyectos basados en la plataforma ARDUINO, apta para todos los públicos.
Opcionalmente a esta tarjeta se le puede conectar un motor DC de bajo consumo (menos de 40mA), el cual se conecta a las salidas (PWM) D3 y D5. Con ellas se puede controlar velocidad y sentido de giro. Mas Info...
La tarjeta entrenadora Arduino (ArduKit) es una placa de bajo costo que se conecta directamente con los controladores Arduino UNO o Arduino Mega2560. Gracias a sus sencillos periféricos y variedad de conectores se convierte en el complemento ideal para realizar los primeros programas y proyectos basados en la plataforma ARDUINO, apta para todos los públicos.
Opcionalmente a esta tarjeta se le puede conectar un motor DC de bajo consumo (menos de 40mA), el cual se conecta a las salidas (PWM) D3 y D5. Con ellas se puede controlar velocidad y sentido de giro. Mas Info... Curso de programación Arduino,
características, usos y aplicaciones.
Ya que el objetivo principal de Arduino es interactuar con el mundo físico, se incluyen en este curso los conocimientos y recursos necesarios para actuar en el mundo real y recoger información de éste. Además, se impartirán nociones básicas de electrónica necesarias para...
Curso de programación Arduino,
características, usos y aplicaciones.
Ya que el objetivo principal de Arduino es interactuar con el mundo físico, se incluyen en este curso los conocimientos y recursos necesarios para actuar en el mundo real y recoger información de éste. Además, se impartirán nociones básicas de electrónica necesarias para...

Este robot único usa tres ruedas-omni para mantener su equilibrio sobre una pelota esférica. Como lo muestra el vídeo mas abajo, puede ser programado para ser dirigido por una persona o simplemente mantenerlo en equilibrio. Este diseño se basa en el mismo principio del Segway. Es un sistema giroscópico eléctrico de tres ruedas, con autobalanceo controlado por microcontrolador. Para funcionar, el robot tiene tres rotores independientes que giran para mantener al robot balanceado. Según los investigadores, un robot dinámicamente estable como éste es mejor que los robots estáticos, ya que pueden tener bases más pequeñas y moverse mejor en las esquinas. Ya que es omnidireccional, se puede mover rápidamente en cualquier sentido, sin necesidad de girar en 180º para darse vuelta..
Para equilibrar el sistema fueron utilizados dos juegos de acelerómetros y giroscopios así como un microcontrolador de 16 bits. La combinación de estos elementoss permite hacer correcciones exactas y rápidas cuando se mueve el robot. Es un robot que se puede maniobrar facilmente y con un centro de gravedad mucho más alto que los robots rodantes tradicionales. Como es omnidireccional, puede moverse fácilmente en cualquier dirección sin tener que dar vuelta primero. Tiene un microcontrolador que lee la información del balance de sus sensores internos, activando las 3 ruedas y haciendo girar la bola en la cual se mueve, un sistema que es esencialmente una unidad inversa al mouse de bola.
Deja un comentario